From 410bfc66c7da9f732f388b48fdf53b3a3c8e5493 Mon Sep 17 00:00:00 2001 From: Jake <jake.read@cba.mit.edu> Date: Sat, 17 Nov 2018 10:40:39 -0500 Subject: [PATCH] typo --- README.md | 6 ++---- circuit/README.md | 4 ++-- embedded/README.md | 9 ++++++++- 3 files changed, 12 insertions(+), 7 deletions(-) diff --git a/README.md b/README.md index 62753a8..e3eb924 100644 --- a/README.md +++ b/README.md @@ -4,11 +4,9 @@ This is a motor driver for Nema 23 size Stepper Motors, which extends the [automatakit](https://gitlab.cba.mit.edu/jakeread/automatakit) architecture. -The board receives commands from an automatakit network and faithfully executes them, replying when complete. +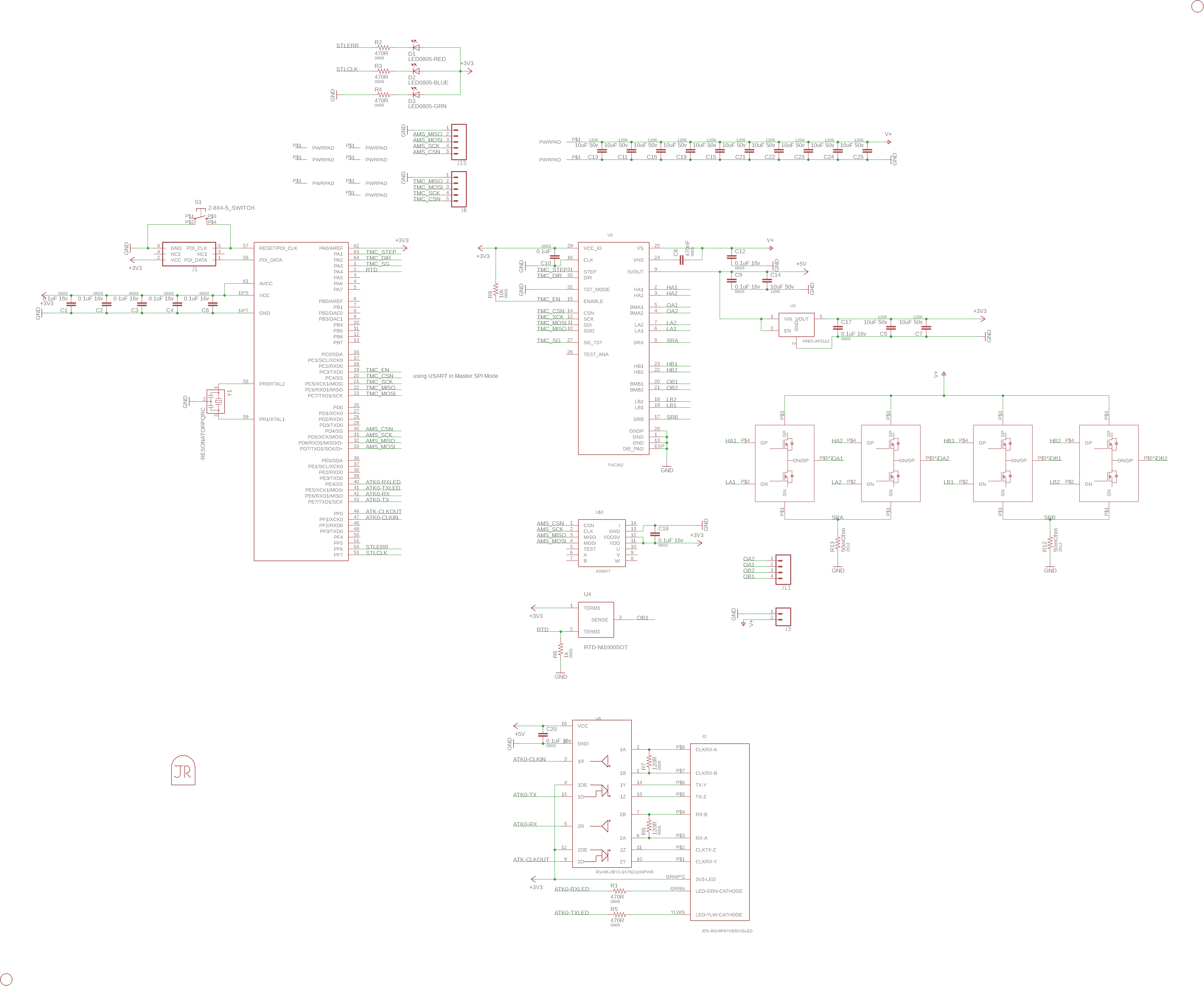 - - - +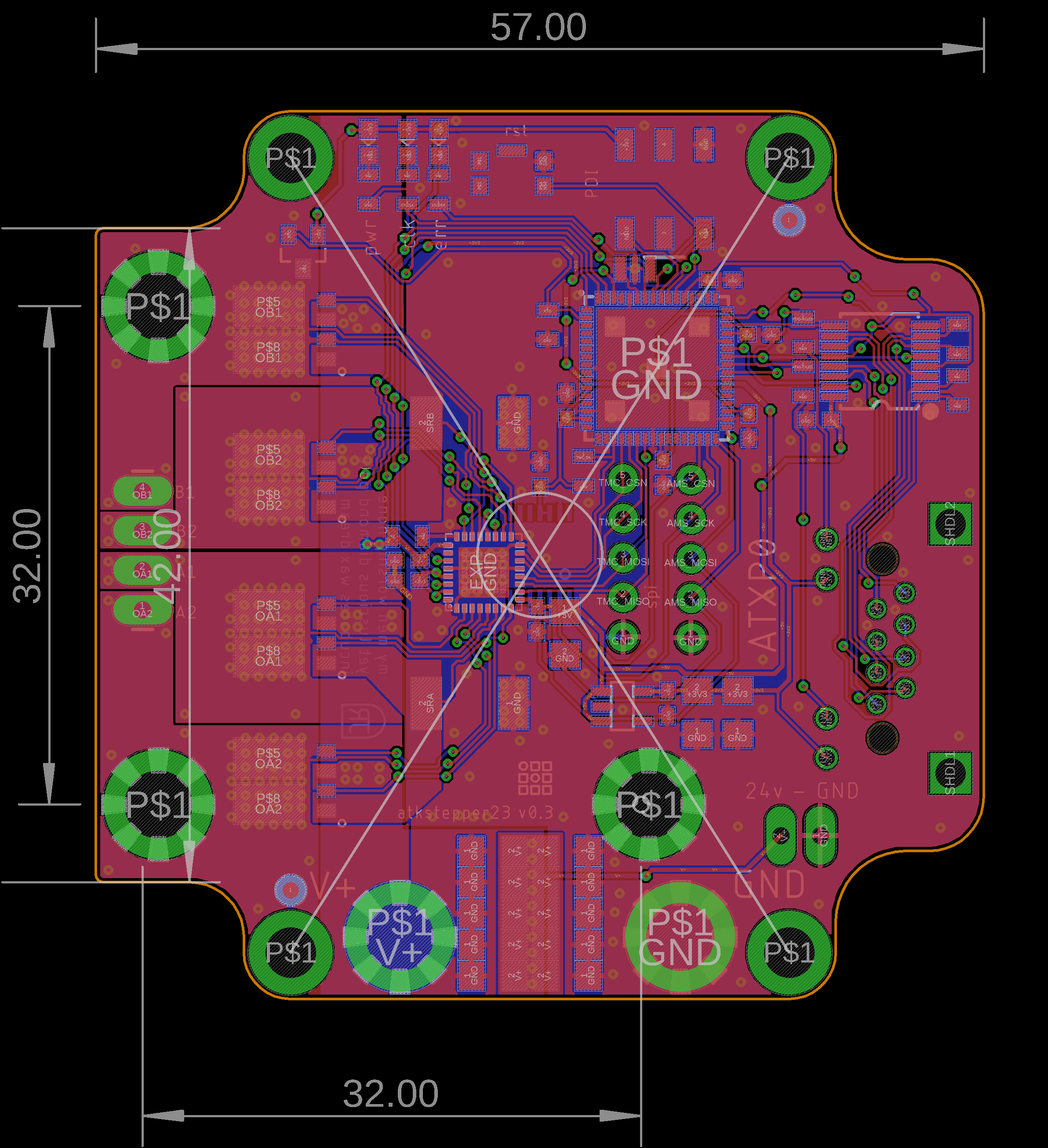 ## Development Notes diff --git a/circuit/README.md b/circuit/README.md index 53c092e..d421c8f 100644 --- a/circuit/README.md +++ b/circuit/README.md @@ -1,8 +1,8 @@ # AutomataKit Stepper23 Circuit Design - + -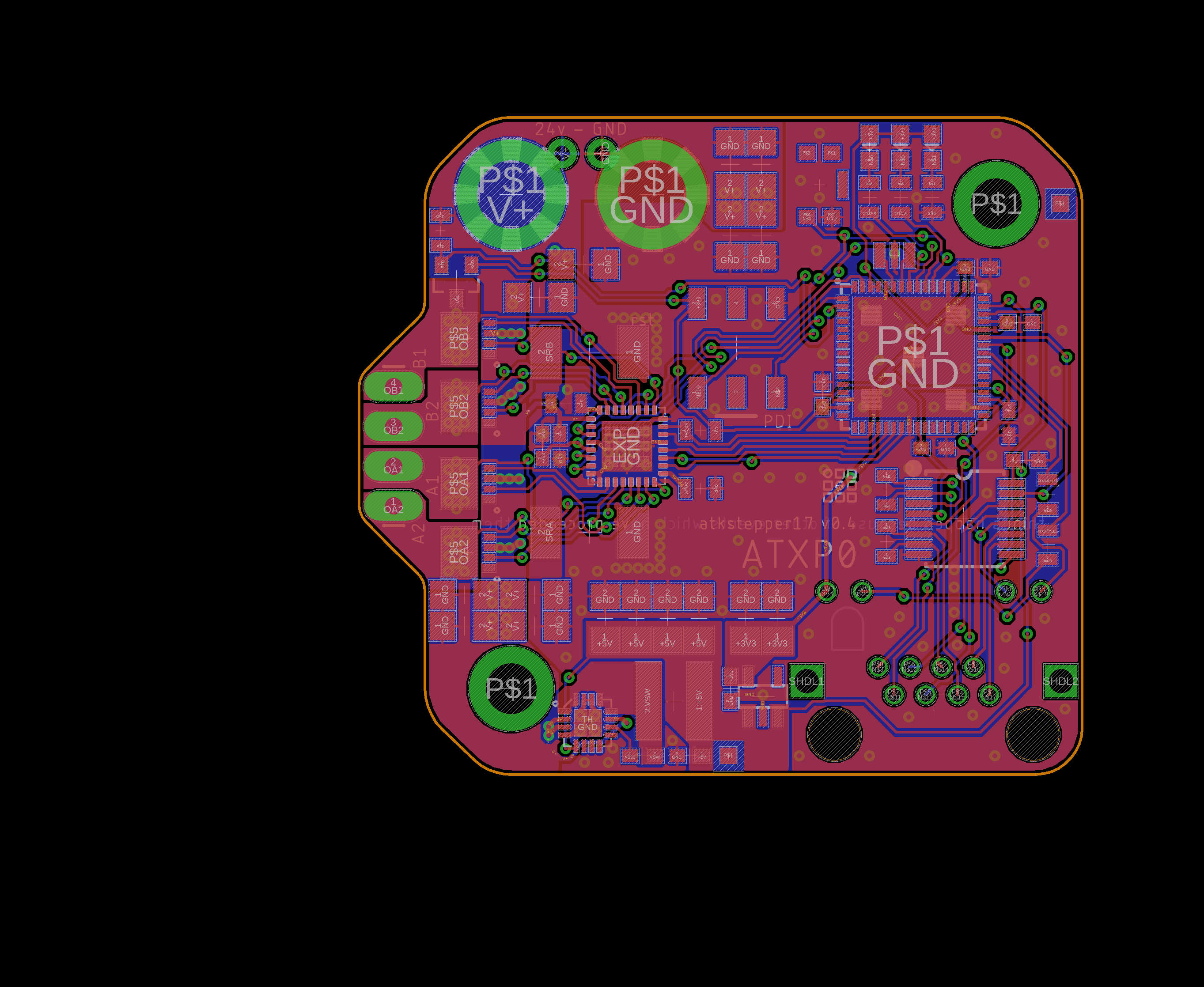 + The circuit uses an ATXmega256A3U microcontroller and a TMC262 step gate-driver, with STI STL40C30H3ll P/N Pair Half Bridges to do the business. Between the driver and microcontroller are an SPI bus, to configure the driver, a diagnosis line, and step, direction, and enable lines. diff --git a/embedded/README.md b/embedded/README.md index e956782..b9420d5 100644 --- a/embedded/README.md +++ b/embedded/README.md @@ -4,4 +4,11 @@ Firmware for the board follows the [automatakit](https://gitlab.cba.mit.edu/jake Communication is handled asynchronously: bytes received on the UART are loaded into a ringbuffer, where they are later parsed in to packets. Parsing happens as oven as possible. -Two hardware timers run step timing, one fires every time a step is to be taken, and another fires when acceleration needs to happen, the 2nd timer changes the period of the 1st. \ No newline at end of file +Two hardware timers run step timing, one fires every time a step is to be taken, and another fires when acceleration needs to happen, the 2nd timer changes the period of the 1st. + +## Step Timing + +I'm interested in doing this well... need to find a good step train solution and figure out what a good networked solution is? + +https://github.com/luni64/TeensyStep +https://forum.arduino.cc/index.php?topic=486106.0 \ No newline at end of file -- GitLab